
환경설정 및 코드다운로드 (WeCAR Sim)
본 페이지는 WeCAR Sim의 예제 코드와 ROS 사용을 위한 가상환경 구축 및 환경설정을 소개한다.
WeCar_Example 코드 다운로드
다운로드 링크 : https://github.com/MORAI-Autonomous/MORAI-Example_WeGo.git
환경설정
실행 환경은 native ubuntu 에서 실행하는 방법과 Window에서 VirtualBox를 이용하는 방법이 있다.
native ubuntu에서는 가상환경 구축 과정을 진행하지 않고, ROS 환경설정 및 코드다운로드 부터 진행한다.
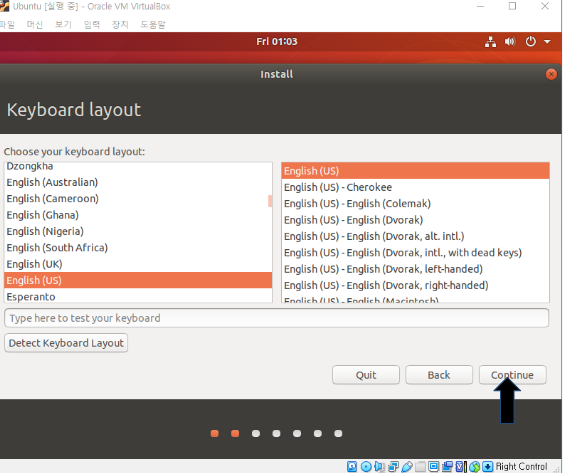
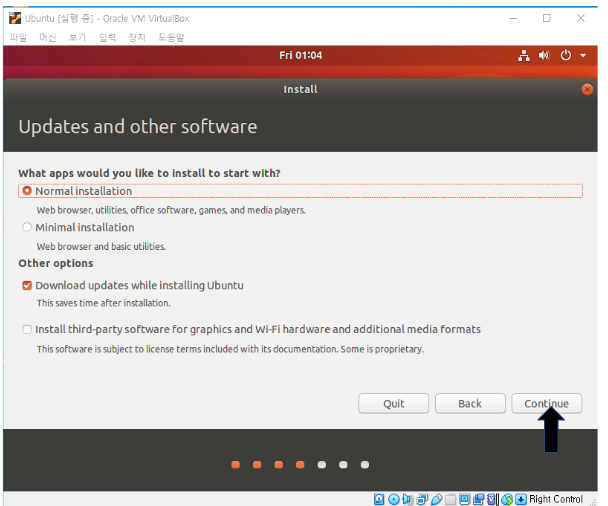
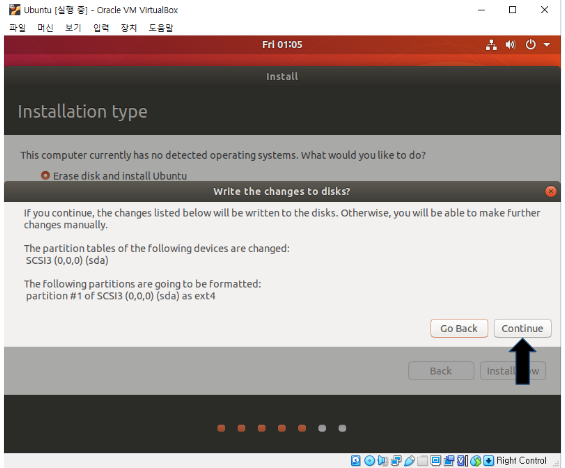
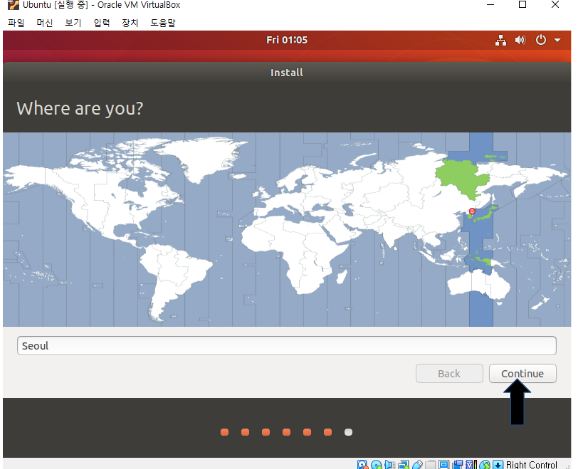
가상환경 구축 (윈도우)
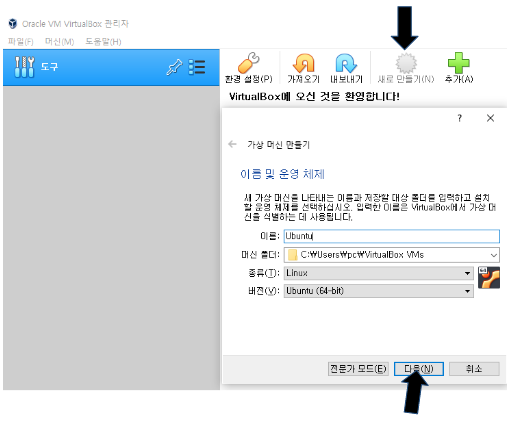
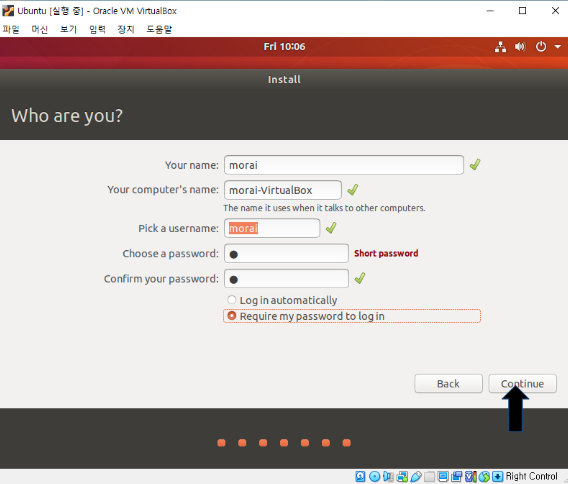
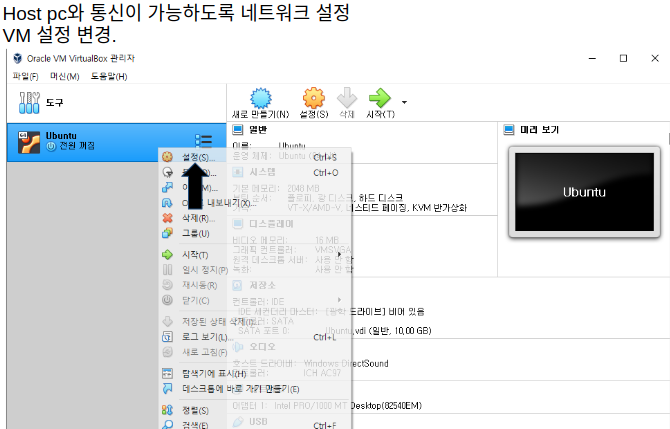
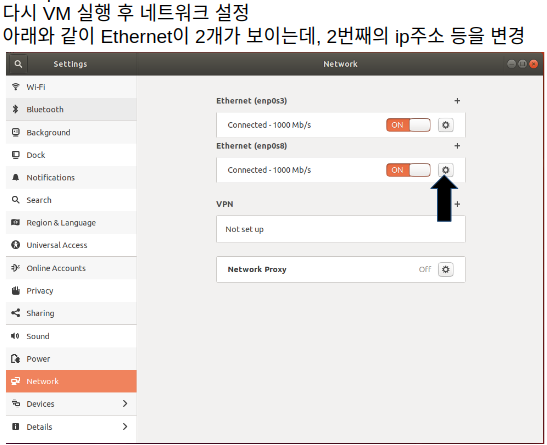
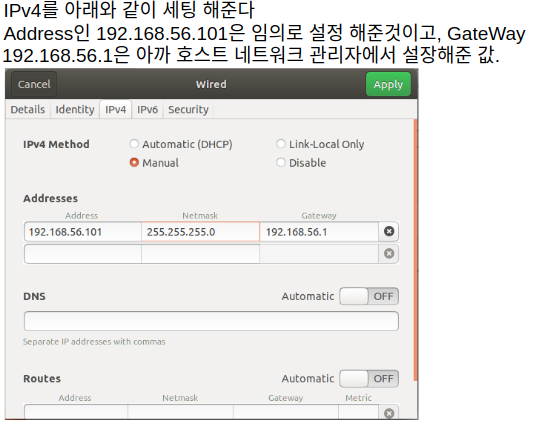
Window 에서 ROS를 사용하기위해 Oracle VM virtualBox를 이용하여 가상환경을 구축한다.
다운로드 : https://www.virtualbox.org/wiki/Downloads (Windows hosts)
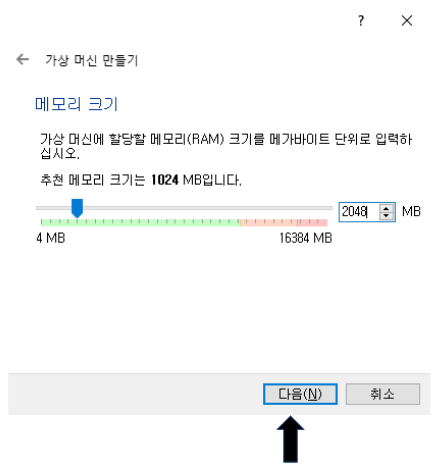
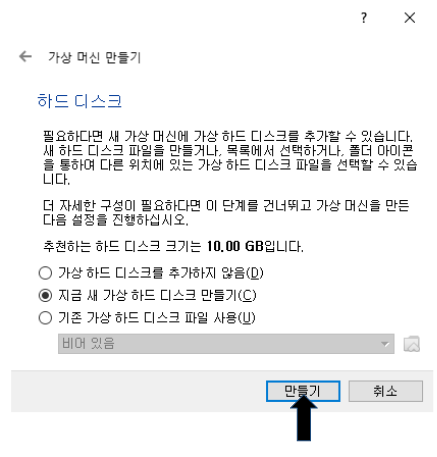
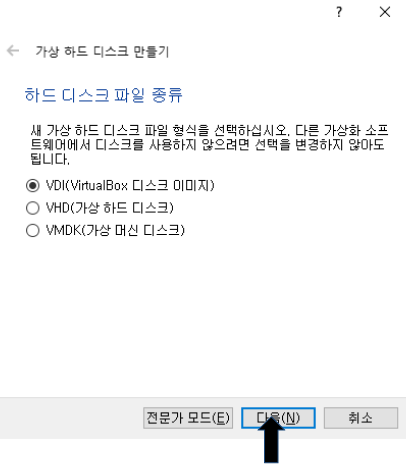
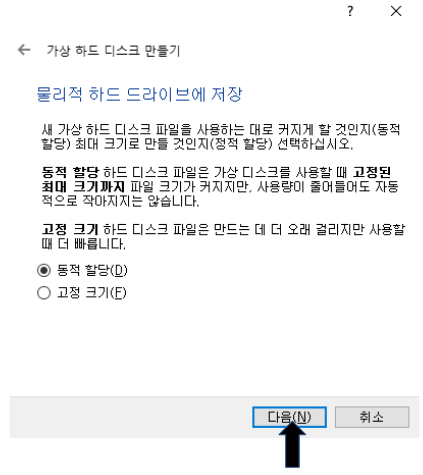
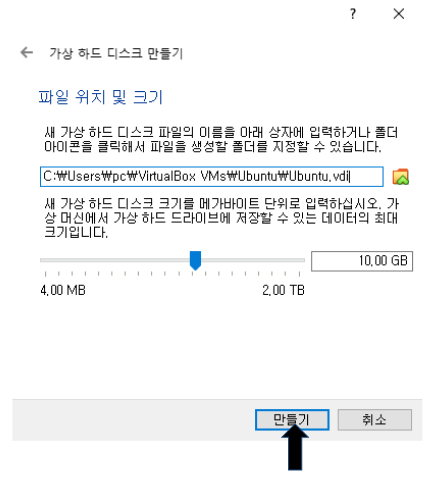
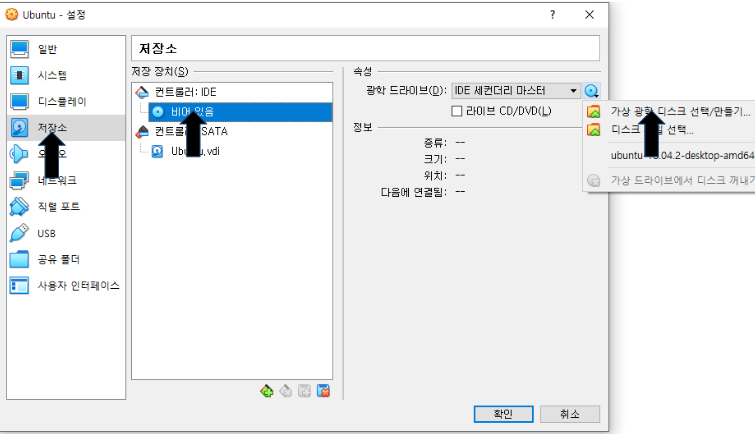
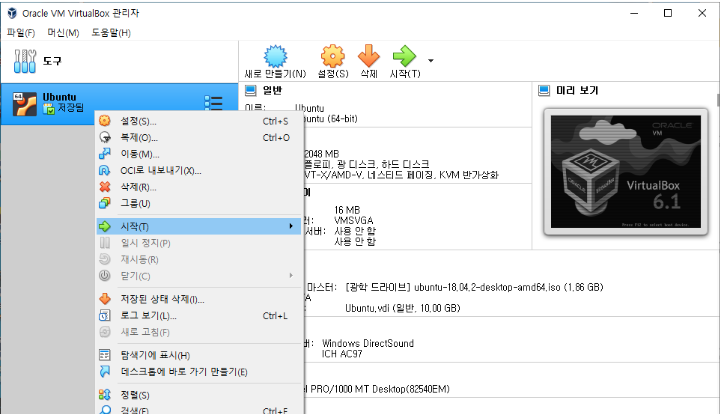
설치후 아래와 같이 가상환경을 구축한다




ROS설치 및 코드 다운로드
권장버전 18.04 , http://wiki.ros.org/melodic/Installation 참조
ROS 설치 후 추가 종속 패키지 설치
sudo apt-get install ros-melodic-rosbridge-server
workspace 생성 및 gen_ros 코드 적용
mkdir -p ~/catkin_ws/src && cd ~/catkin_ws/src예제코드 다운로드 : https://github.com/MORAI-Autonomous/MORAI-Example_WeGo.git
다운 받은 예제 코드 폴더에서 ros_example_packages폴더의 wecar_ros 폴더와 wecar_msgs폴더를 src폴더에 복사
아래 코드를 실행
cd..catkin_makecd ~/catkin_wssource devel/setup.bash