Sensor Noise 생성 기능 사용 방법
본 페이지는 Sensor Noise(GPS, Lidar, IMU)를 생성하고 사용하는 방법을 소개한다.
GPS Noise
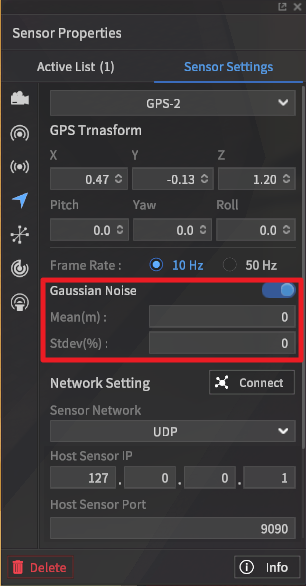
GPS 는 Gaussian Noise를 적용 시킬 수 있다.
Gaussian Noise 토글 활성화를 통해 Noise를 생성 할 수 있음.
Noise 수치는 Mean(m), Stdev(%) 값을 입력하여 조절 가능함.
LiDAR Noise
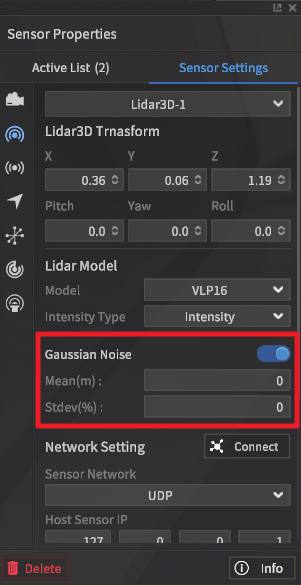
LiDAR 는 Gaussian Noise를 적용 시킬 수 있다.
Gaussian Noise 토글 활성화를 통해 Noise를 생성 할 수 있음.
Noise 수치는 Mean(m), Stdev(%) 값을 입력하여 조절 가능함.
22.R1.0 버전부터 LiDAR Gaussian Noise 최적화 적용
LiDAR Sensor Gaussian Noise 퍼포먼스 향상
LiDAR CH128 기준 Gaussian Noise를 활성화 시
변경전 : ~5-10 fps
변경후 : ~60+ fps
IMU Noise Filter
IMU 는 Bias-instability, Random Walk(Rate Random Walk), White Noise(Velocity(Angle) Random Walk)를 적용 시킬 수 있다.
각 Noise Model 좌측에 있는 체크 박스를 체크 또는 해제하여 각 Noise를 on/off 할 수 있음.
각 Noise의 파라미터 및 단위는 다음과 같으며, 사용되는 IMU의 특성에 맞게 설정 가능함.
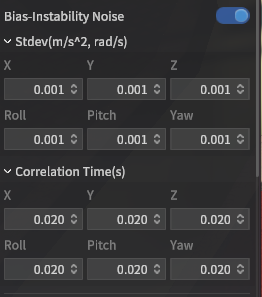
Bias-instability Noise
Bias-instability Standard deviation(sigma)
- Acceleration : m/s^2
- Gyroscope - rad/sCorrelation Time (s)
Random Walk Noise (Rate Random Walk)
Random Walk Standard deviation(sigma)
- Acceleration - m/s/h^(3/2)
- Gyroscope - rad/h^(3/2)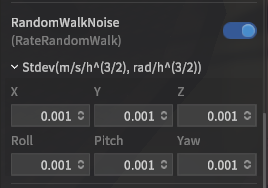
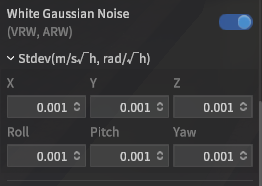
White Noise (Velocity(Angle) Random Walk)
White Noise standard deviation(sigma)
- Acceleration - m/s/√h
- Gyroscope - rad/√h