
Scout-Mini
Scout-Mini Simulator에서는 ROS 프로토콜을 제공한다.
네트워크 설정
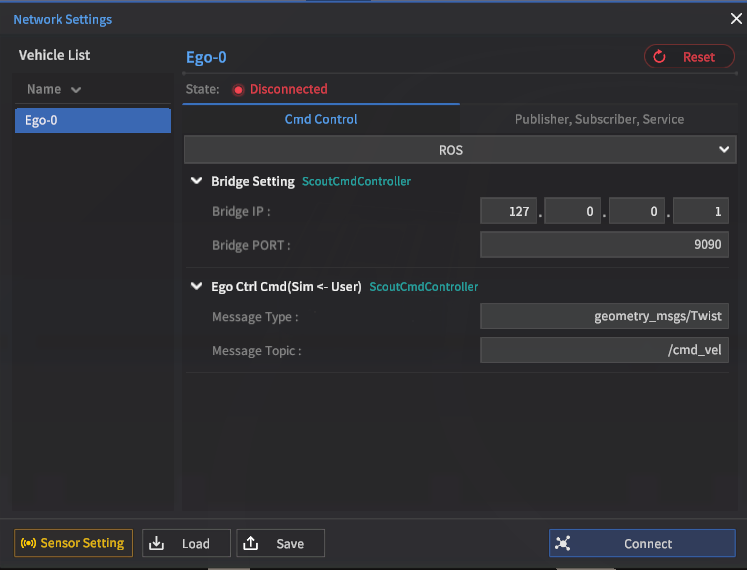
사용자의 자율주행SW와 시뮬레이터 사이의 데이터 통신을 위한 설정 정보를 입력한다.
ROS
Bridge Setting
Network > Networks Settings 에서 ROS Bridge의 IP와 Port를 입력한다.
Bridge IP 는 rosbridge를 실행 하고 있는 IP를 입력한다.
Local 환경 :
127.0.0.1Virtual 환경 : 가상환경 설치할때 세팅했던 IP
Scout-Mini ROS Message Type
Ego Ctrl Cmd
차량 제어 명령
Message Type : geometry_msgs/Twist
Default Topic : /cmd_vel
타입 설명 : 차량의 선 속도, 각속도 제어를 위한 명령 값
float64 linear.x : 선속도 값 의미 (m/sec)
(min : -3.024 ~ 0 ~ max : 3.024)
float64 angular.z : 각속도 값 의미 (rad/sec)
(min : -2.5 ~ 0 ~ max : 2.5)
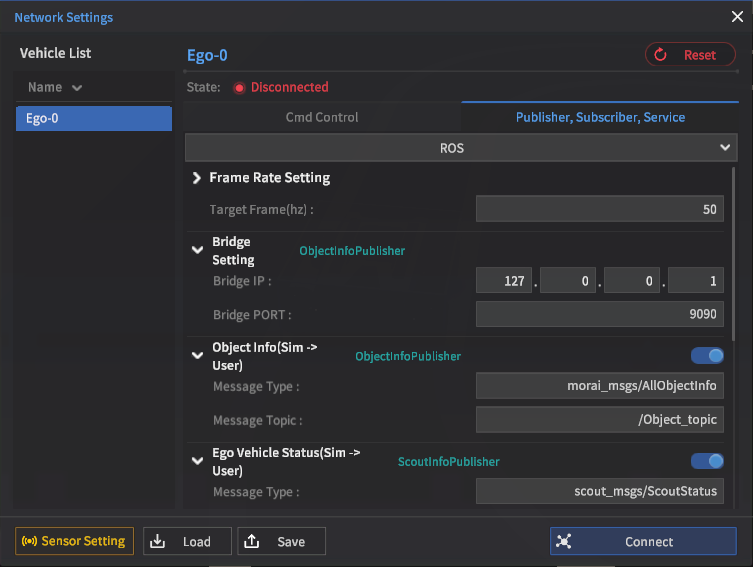
Ego Vehicle Status
차량 상태 정보
Message Type : scout_msgs/ScoutStatus
Default Topic : /scout_status
타입 설명 : 차량의 상태를 나타내는 메시지
float64 linear_velocity : 선속도 (m/sec)
float64 angular_velocity : 각속도 (rad/sec)
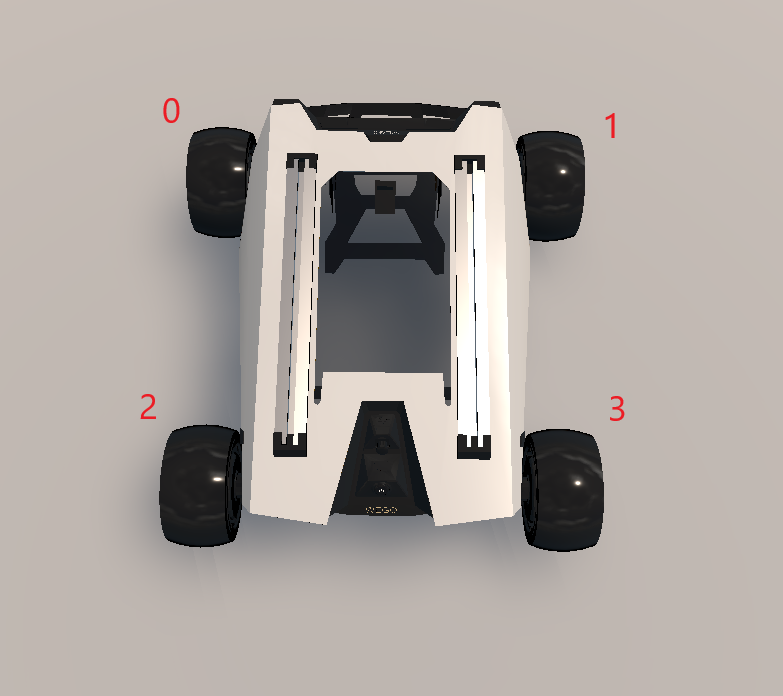
scout_msgs/ScoutMotorState[4] motor_states : 모터의 상태
float64 current
float64 rpm : 각 모터의 상태를 나타내는 메시지 이며 현재 speed (rpm)값만 전송된다.
float64 temperature
사진에 표시된 인덱스가 해당 바퀴 모터의 정보를 담고 있다.
Scout Light Controll (Sim ← User)
Scout Mini 차량 Lamp Controll
Message Type : scout_msgs/ScoutLightCmd
Default Topic : /scout_light_control
bool enable_cmd_light_control
uint8 front_mode
uint8 front_custom_value
uint8 rear_mode
uint8 rear_custom_value
Object Info
주변 물체 정보
MoraiObjectInfoPublisher (Sim → User)
Message Type : morai_msgs/ObjectStatusList
Default Topic : /Object_topic
타입 설명 : 사용자가 배치한 주변 물체들에 대한 정보를 나타내는 메시지
Header header
int32 num_of_npcs : 사용자가 배치한 npc 차량의 개수.
int32 num_of_pedestrian : 사용자가 배치한 pedestrian의 개수.
int32 num_of_obstacle : 사용자가 배치한 obstacle의 개수.
ObjectStatus[] npc_list : npc 차량 정보 ( 아래의 ObjectStatus 타입 참고)
ObjectStatus[] pedestrian_list : pedestrian 정보 ( 아래의 ObjectStatus 타입 참고)
ObjectStatus[] obstacle_list : obstacle 정보 ( 아래의 ObjectStatus 타입 참고)
네트워크 설정 저장 & 불러오기
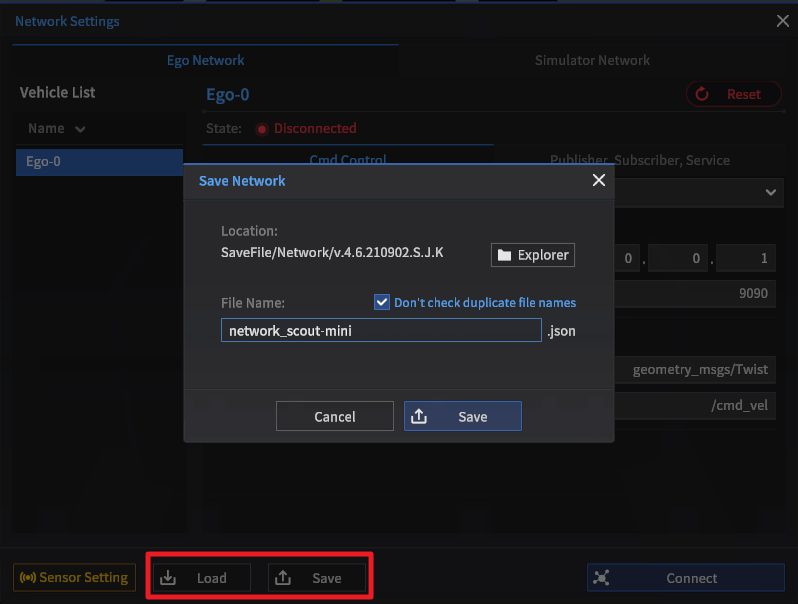
Network > Load Settings > Save 를 이용하여 현재의 네트워크 설정 정보를 저장할 수 있다.
저장된 네트워크 설정 정보는 File List에 표시되며, 설정 정보를 Load를 통해 불러오거나, Del을 통해 삭제할 수 있다.